If you recall reading any technology news or even browsing the Internet around 2016, you probably remember the hype surrounding self-driving cars. It seemed that every man and his dog would be chauffeured around by robot drivers in the space of a few years. I mean, we all know that the media tends to preempt future technology, but, to me at least, the slow progress seems a little disappointing. So where are these robo-taxis? Before examining the cutting edge of autonomous vehicle advancements and analysing the sources of delay, we must briefly consider the history of autonomous vehicle progress.
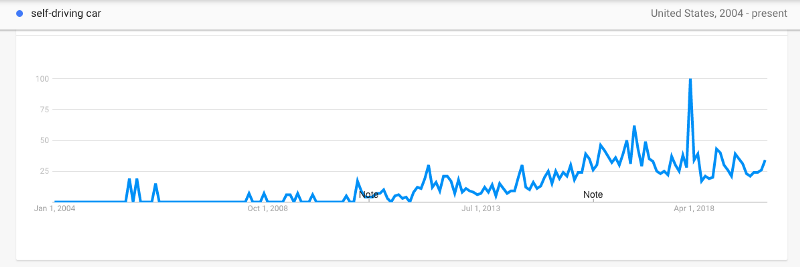
Google Trends Data for “self-driving car”. There is a clear increase in search interest from about 2013 to 2016
An idea is born
From as early as the 1920s, the collective American consciousness became fascinated by the concept of self-driving cars. Although very far distant from the modern sense of the word, these odd curiosities offered consumers a fantasy: the freedom of driving in its purest form with the hassle of actually driving distilled away. In a sense, they embodied the quintessence of the American Dream.
For all of these early demonstrations, the ‘autonomy’ occurred outside the vehicle itself — whether it be transmitted by radio waves (as in the “American Wonder”) or in the very road surface (e.g. electromagnetic fields).

“American Wonder” radio-controlled car. Credit: Wikimedia Commons
Early on, miniature or model cars were used to envision an automated highway system but eventually some trials of in-road guidance systems (e.g. by RCA Labs) were conducted with real vehicles.

Radio-controlled vehicles as part of “Futurama” at the 1939 World’s Fair. Credit: Norman Bell Geddes — Magic Motorways
As you can probably imagine, none of these really live up to our expectations for autonomous vehicles but they, too, were a product of their time and were limited by contemporary technology in a pre-computing age. What was needed to advance vehicular autonomy was computer vision.
Enter Ernst Dickmanns: computer vision pioneer, university professor and driver of self-driving.
As some of the first true self-driving vehicles were being created in the 1980s, Dickmanns was at the helm. His vision-guided robotic van achieved speeds of up to 63 km/h on public streets devoid of traffic. Although ostensibly a simple feat from a modern lens, Dickmanns was blazing a trail into the great unknown.
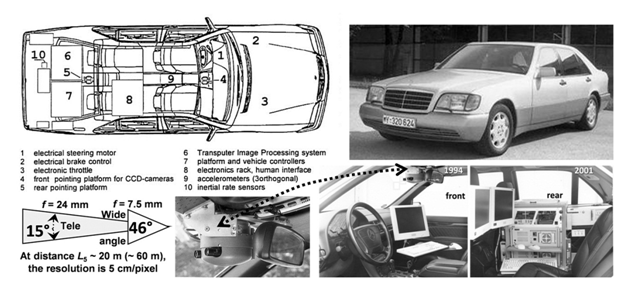
Plans of Ernst Dickmanns as part of the Prometheus Project. Credit: Wikimedia Commons
Following these early attempts, the field attracted some scientific interest. In Europe, there was the Prometheus Project with €749,000,000 and Ernst Dickmanns on board. In the US, Carnegie Mellon University and SRI International, alongside other institutions, started to study the potential for autonomy, using LIDAR and Computer Vision to control a robotic vehicle. In these early attempts, they even introduced neural networks (an approach with significant modern relevance) to control the vehicles.
Approaches to self-driving:
To give context to this rapid innovation in the self-driving field, it is worth discussing the approaches taken by more modern projects. As these engineers were rapidly discovering, the sensor arrays needed to facilitate comprehensive computer vision are nothing to sneeze at. In fact, of the most common techniques — Radar, LIDAR, Ultrasonic and visible light — no one approach seems fully capable on its own:
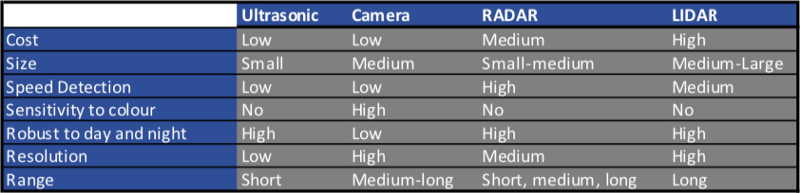
Features of various self-driving sensors. Data: Michigan Tech Research Institute
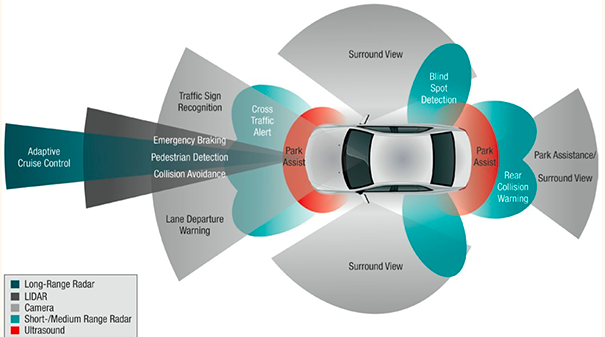
Self-driving sensor capability diagram. Graphic: Michigan Tech Research Institute
As well as actual capability, the vulnerability of each sensor type to external weather factors is also an important consideration.
Already, the combination of sensors has sparked debate as Elon Musk, CEO of Tesla — a company with significant self-driving endeavours -, labelled “Anyone relying on lidar” as “doomed”. Although he claimed that LIDAR sensors were both “expensive” and “unnecessary”, perhaps, too, the current bulkiness of these sensors may be incompatible with the higher-end sleek appeal of Tesla vehicles.

The bulky sensor arrays which often characterise self-driving (as shown here) may not fit with the brand/aesthetic of Tesla’s vehicles Credit: Mariordo
Meanwhile, other competing companies have selected their own combinations to optimise a variety of these listed variables and to suit their own goals (as will be discussed further on).
The forgotten cars of the 1990s
When we talk about self-driving cars nowadays, we often seem to think that they are a very new concept whose technology has only emerged recently. However, you may be surprised to learn that there were many forays and large investments into autonomy back before the turn of the century.
From the US government, a program called the National Automated Highway System Consortium (NAHSC) received wide media coverage. Here, a variety of approaches and intelligence distributions were tested.

Photograph of NAHSC trial with cars ‘platooning’. Credit: UC Berkeley
Once again, Professor Dickmanns continued his research with two vehicles as part of the aforementioned Prometheus project. Driving on Parisian roads in France, these reached still higher top speeds of up to 130km/h. Although there was human intervention required, the success of these trials in heavy traffic, stepped even closer to the challenges faced by modern projects.
Likewise, Carnegie Mellon University remained a major player with their neural-network-steered car (with a human on brakes and throttle) which travelled around 5000km across the entire continental United States. Driving autonomously for 98.2% of the journey, the project even received the affectionate nickname “No Hands Across America”.
No Hands Across America Logo
Following another endeavour from Dickmanns across the pond, Parma University entered the scene with their ARGO vehicle. This covered another impressive distance of 1900km across Italy and combined video cameras with stereoscopic algorithms to observe the surrounding environment.
Considering this international endeavour and abundance of effort, the 90s seem like a self-driving golden age that occurred nearly 20 years ago. So, for those who remember this era, the above question is even more pressing: What happened to self-driving cars?
DARPA Grand Challenges

The DARPA Grand Challenges considered some of the problems self-driving had to overcome Credit: Wikimedia Commons
Past the turn of the century, the obstacles to widespread self-driving started to become more apparent, shattering all hope of autonomous vehicles being just around the corner.
After some US military trials of autonomous tech in the early 2000s, the US DARPA (Defense Advanced Research Projects Agency), held three ‘Grand Challenges’ for self-driving.
These rigorous gauntlets for autonomous vehicles pushed self-driving technology to its limits and encouraged scientific competition between institutions, spurring on development.
The first challenge in 2004 was a 240 km course in the blazing Mojave Desert. In summary, team performance was rather disheartening. Numerous teams suffered from mechanical problems including “malfunctioning navigation equipment” and “stuck brakes”. Even Carnegie Mellon — a veteran by now in this field — travelled only 11.9 km (less than 5% of the course) although this was the farthest travelled by any vehicle.

Carnegie Mellon ‘Red Team’ in Grand Challenge I. Credit: Wikimedia Commons
The second challenge a year later met a little more success. This time, five vehicles finished a similar desert course, showing a marked improvement. Stanford finished first with two Carnegie teams coming in a close second.

Winning Stanford Team at the Grand Challenge II. Credit: Wikimedia Commons
Perhaps the third challenge is the most relevant in a modern context as it took place in an urban environment. This 96km city-style course made traffic laws a priority, mimicking the challenges that self-driving vehicles face in today’s world. Further, the vehicles were tested in their interactions with others — both professional human drivers and other self-driving cars.

Urban Setting at Grand Challenge III. Credit: DARPA
All in all, these challenges provided an opportunity for students and professionals alike to see the true potential in self-driving. Further, the eventual success of teams after trials and tribulations, especially in the urban Third Challenge, seemed to finally indicate that autonomy was truly possible.
The race for autonomy:
In 2009 Google privately began development of its self-driving car program; one of the major players in the current self-driving space was emerging. The race was on.

The current fruits of Google’s self-driving program — Waymo. Credit: Dllu
Although seeking similar autonomous capabilities, the companies currently involved in self-driving development have a variety of different motivations and goals. For traditional car-makers like Ford and Volkswagen, the self-driving business threatens to compromise their profits if they don’t manage to keep up.
For more ailing manufacturers like General Motors (with Cruise Automation), self-driving is an opportunity to restore their fortunes and stave off potential disaster. Likewise, Uber, if successful in self-driving, could expand their business and diversify from merely a ride-sharing app amongst competition.
And then, of course, the tech giants Apple and Google are involved. Apple’s self-driving project has yet to be discussed publicly by them but under the codename ‘Project Titan’, it is shrouded with rumour and hearsay.
In contrast, Alphabet’s endeavour Waymo seems to be meeting targets with its current driverless trials in Arizona while the press is surprisingly positive.
Tesla’s role in the field is rather intriguing. Although Tesla’s self-driving capabilities are by no means much further advanced than others, their autopilot feature is perceived by many consumers to be safer than it is. According to a study done by the IIHS (Insurance Institute for Highway Safety), drivers feel far safer in behaving incorrectly at the hands of Tesla’s autopilot when compared with other systems.
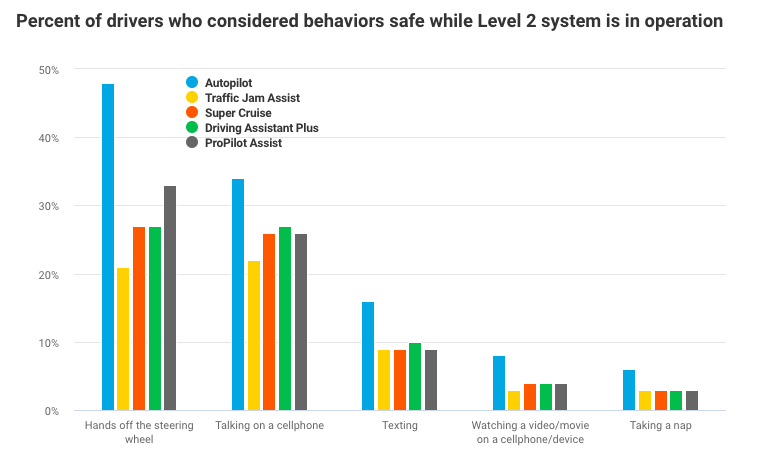
Comparison of incorrect behaviours with Level 2 Autonomous Systems. Credit: ihis.org
It would be helpful to take a look at the different SAE levels of automation, a common scale used to categorise autonomous vehicles:
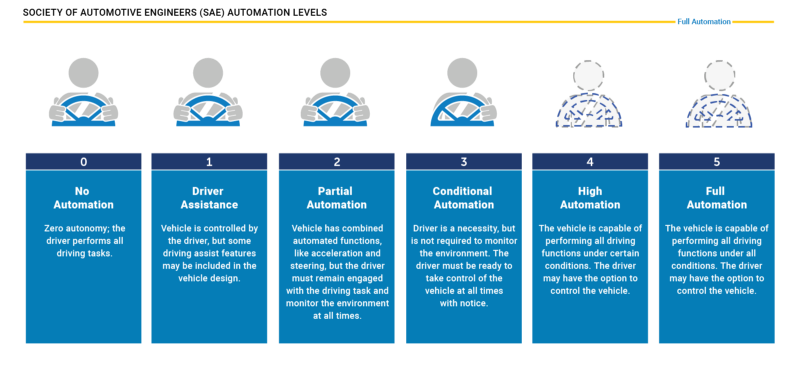
SAE Levels of Automation Credit: NHTSA
So, on this scale, Tesla autopilot ranks as a level 2 system (alongside the automation systems of other manufacturers) as much as terms like ‘Full Self-Driving’ and ‘autopilot’ might have you believe otherwise. Thus, although only slightly more advanced currently than traditional cruise control systems, it seems that public opinion has been won over by Musk.
In light of this immense competition and diversity of approaches as well as the long history of autonomous vehicles, the question still remains: What happened to self-driving cars?
Further, aside from the mainstream race towards self-driving cars, we can also see autonomous tech filtering into other parts of society
Alternate Uses:
Preceding the current race for self-driving technology, less-complex autonomous systems have met some success in other fields.
Back in the late 2000s, Australian mining giant Rio Tinto found success with autonomy in mining vehicles. Due to productivity and safety improvements, the company moved to investigate the field further and add more driverless trucks to its fleet.

Rio Tinto autonomous mining transport. Credit: Rio Tinto media release
Likewise, autonomous shuttles have found some use in lower-risk applications. For example, the ParkShuttle in Rotterdam that travels a predefined route or the small, slow-moving shuttles undergoing testing in Greenwich, England.

Autonomous ParkShuttle service in Rotterdam, The Netherlands. Credit: Wikimedia Commons
More recently, some US college students have observed trials of autonomous food delivery bots by Starship Technologies.

Starship Technologies delivery bot. Credit: Mart Rootamm
And as much as dealing with pesky students is probably quite a difficult challenge, these alternate use-cases mark the answer to our eponymous question: Risk.
Incidents and Legislation
If you looked at the Google Trends graph below this article’s title, you probably noticed that self-driving reached its peak search interest in March 2018. As you may recall, this was the month in which one of Uber’s self-driving vehicles fatally struck a pedestrian. It seems that, for many, this risk or a broader sense of general unease colours their view of self-driving vehicles.
As observed in a study published in the journal ‘Transportation’, commuters required a far higher travel time reduction from autonomous ride-sharing than contemporary solutions like Uber and Lyft to prefer it to driving themselves. In their analysis, they equated this with a “lack of familiarity and comfort with driverless technology at present”. And perhaps this is understandable. As much as every online tech guru demands that self-driving be instituted as soon as it outperforms humans, there are still key ethical questions to be answered. MIT’s Moral Machine experiment that took the internet by storm, reveals just this.
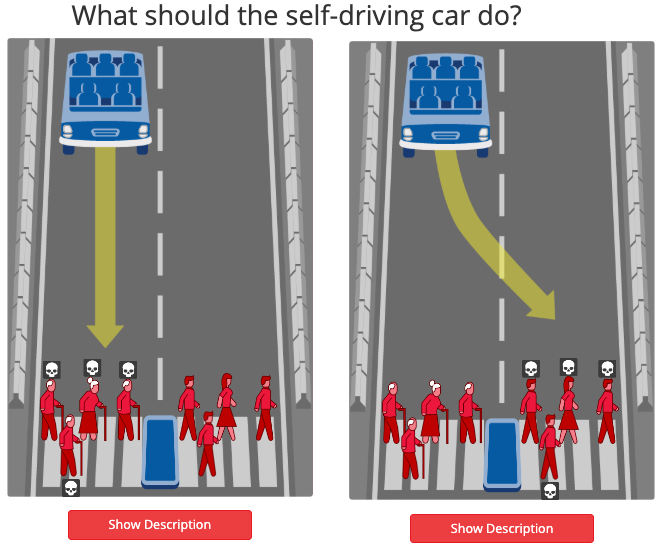
Sample dilemma from MIT’s Moral Machine Experiment
Reframing the Trolley Problem as a self-driving thought experiment, the creators drew into focus some key questions behind autonomous vehicle legislation.
How do we make decisions and who do we hold responsible?
With a human at the wheel and split-second reactions, such situations are fuzzy and based on impulse. With a robot at the wheel, each crash has a distinct traceback of decisions made and an engineer or team behind that functionality — whether directly or by feeding their neural network data with a certain bias. And it seems all too human to find a villain and make someone culpable.
Should one engineer be held responsible if doing their job ends a life?
At least from my perspective, I’m not sure whether we, as a society, have answered these questions — let alone the law.
And so the caution displayed by countries, states, and cities to accept self-driving is perhaps understandable. That’s why it seems all too easy to implement autonomy in the aforementioned lower risk situations. Even the state of California which is among the regions most welcoming to autonomy globally, self-driving companies are currently banned from charging fares when offering ride-sharing. Although ostensibly minor, this points to a larger perception of contemporary self-driving as an experimental technology rather than a legitimate business endeavour.
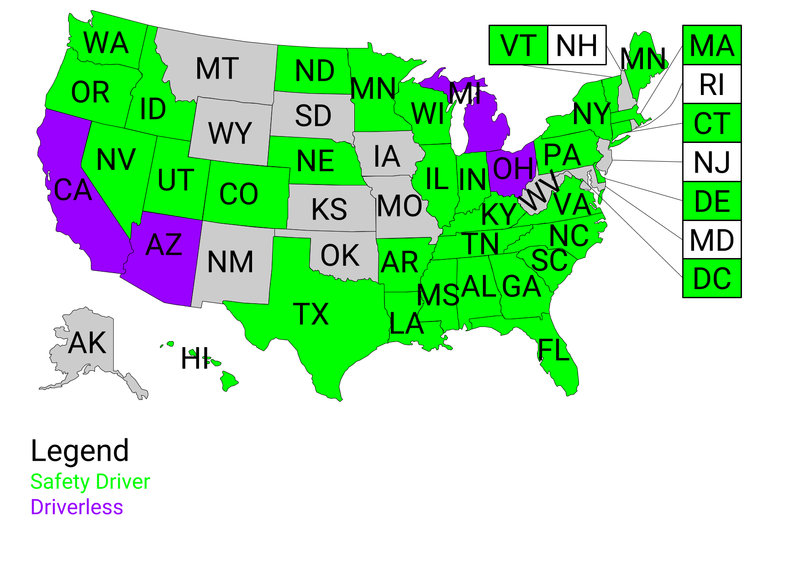
Very few US states allow fully driverless cars to drive on their roads (as of 2016). Credit: EatePurple from Wikimedia Commons
Yes, this measure is only temporary and yes, change will happen but when? And what happened to the self-driving cars we were promised back in 2016?
What happened to self-driving cars?
In the end, at least to my eye, this all comes down to hype.
Companies make it.
The media sells it.
The internet consumes it.
And the cycle continues.
The technology certainly seems capable and the broad strokes are just within our reach. But all the intricacies that come with something of this scale under such great regulatory oversight are still not entirely figured out.
So what happened to self-driving cars?
Well…
They’re just a few years off….